k210模块¶
提供与k210相关的函数接口,AI摄像头、1956、人工智能交互实验箱都包含有k210处理器的相关图形化指令
Image 类¶
图像处理相关
构建对象¶
- class Image(repl, ref=None)¶
兼容掌控板绘图相关¶
为了便于使用和教学,提供一些与掌控板相兼容的绘图函数接口。注意,这些函数并不是MaixPy原生所有。
- Image.DispChar(text, x, y, color=(255, 255, 255))¶
描述: 在图像中的(x, y)位置开始绘制文本。字体采用 Google Noto Sans CJK 开源无衬线字体字体。字体高度16像素点,支持英文,简体中文繁体中文,日文和韩文语言。
- 参数:
text-- 绘制的文本
x、y-- 起点坐标
color-- 字体颜色
OpenMV¶
移植于MaixPy的OpenMV函数

- Image.load(path, copy_to_fb=True)¶
描述: 从
path中的文件中创建一个新的图像对象。可以把图片存放至SD卡中,将对应图片文件路径作为该函数参数,将会创建该帧图片对象。支持bmp/pgm/ppm/jpg/jpeg格式的图像文件。参数: 若
copy_to_fb为True,图像会直接载入帧缓冲区,您就可以加载大幅图片了。若为False,图像会载入MicroPython的堆中,堆远比帧缓冲区小。copy_to_fb为False,您应该尽量把图像大小控制在8KB以下。若为True,则图像最大可为160KB。注意
使用时需要注意图片分辨率大小,过大的话会导致内存错误!

- save(path, roi=None, quality=50)¶
描述: 将图像的副本保存到
path中的k210的文件系统支持bmp/pgm/ppm/jpg/jpeg格式的图像文件。注意:您无法将jpeg格式的压缩图像保存成未压缩的格式。
参数:
roi是一个用以复制的矩形的感兴趣区域(x, y, w, h)。如果未指定,ROI即复制整个图像的图像矩形。但这不适用于JPEG图像。
quality指在图像尚未被压缩时将图像保存为JPEG格式的JPEG压缩质量。
- Image.clear()¶
描述: 将图像中的所有像素设置为零(非常快)。
- Image.pix_to_ai()¶
描述: 将图像的所有像素点转换成AI运算的数据
- Image.strech_char(de_dark)¶
描述: 预处理消除暗角
- Image.invert()¶
描述: 将二进制图像0(黑色)变为1(白色),1(白色)变为0(黑色),非常快速地翻转二进制图像中的所有像素值。
不支持压缩图像和Bayer图像。
- Image.draw_line(x0, y0, x1, y1, color=(255, 255, 255), thickness=1)¶
描述: 在图像上绘制一条从(x0,y0)到(x1,y1)的线。 您可以单独传递x0,y0,x1,y1,也可以传递给元组(x0,y0,x1,y1)。
参数:
color- 是用于灰度或RGB565图像的元组。默认为白色。但是,您也可以传递灰度图像的基础像素值(0-255)或RGB565图像的字节反转RGB565值。
thickness- 控制线的粗细像素。
- Image.draw_circle(x, y, radius, color=(255, 255, 255), thickness=1, fill=False)¶
描述: 在图像上绘制一个圆形。 您可以单独传递x,y,半径 或 作为元组(x,y,radius)传递。
参数:
color- 是用于灰度或RGB565图像的元组。默认为白色。但是,您也可以传递灰度图像的基础像素值(0-255)或RGB565图像的字节反转RGB565值。
thickness- 控制线的粗细像素。
fill- 设置为True以填充圆形。
- Image.draw_rectangle(x, y, w, h, color=(255, 255, 255), thickness=1, fill=False)¶
描述: 在图像上绘制一个矩形。 您可以单独传递x,y,w,h或作为元组(x,y,w,h)传递。
参数:
color- 是用于灰度或RGB565图像的元组。默认为白色。但是,您也可以传递灰度图像的基础像素值(0-255)或RGB565图像的字节反转RGB565值。
thickness- 控制线的粗细像素。
fill- 设置为True以填充矩形。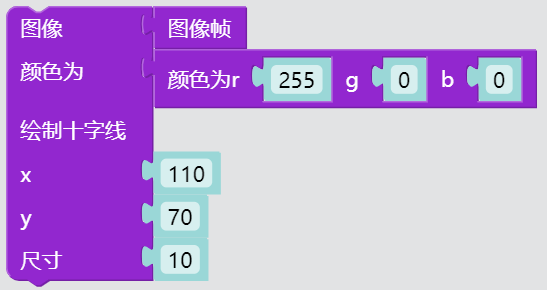
- Image.draw_cross(x, y, color=(255, 255, 255), size=5, thickness=1)¶
描述: 在图像上绘制一个十字。 您可以单独传递x,y或作为元组(x,y)传递。
参数:
color-- 是用于灰度或RGB565图像的RGB888元组。默认为白色。但是,您也可以传递灰度图像的基础像素值(0-255)或RGB565图像的字节反转RGB565值。
size-- 控制十字线的延伸长度。
thickness-- 控制边缘的像素厚度。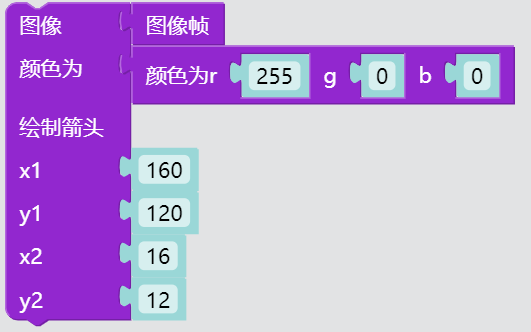
- Image.draw_arrow(x0, y0, x1, y1, color=(255, 255, 255), thickness=1)¶
描述: 在图像上绘制一条从(x0,y0)到(x1,y1)的箭头。
参数:
color- 是用于灰度或RGB565图像的元组。默认为白色。但是,您也可以传递灰度图像的基础像素值(0-255)或RGB565图像的字节反转RGB565值。
thickness- 控制线的粗细像素。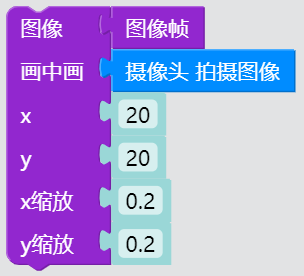
- Image.draw_image(image, x, y, x_scale=1.0, y_scale=1.0, alpha=256)¶
描述: 绘制一个
image,其左上角从位置x,y开始。参数:
x_scale-- 控制图像在x方向(浮点数)缩放的程度。
y_scale-- 控制图像在y方向(浮点数)缩放的程度。
alpha-- 控制另一幅图像与这幅图像的混合程度。 alpha 应该是0到256之间的一个整数值。接近零的值会将更多其他图像混合到该图像中,而接近256的值则相反。
- Image.resize(w, h)¶
描述: 改变图像大小,
w、h为图像修改后的图像宽高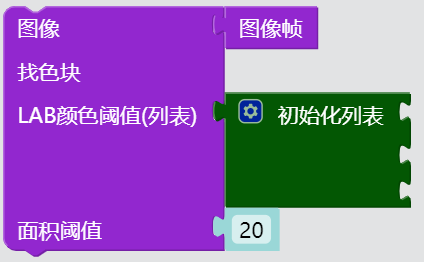
- Image.find_blobs(thresholds, invert=False, roi=None, x_stride=2, y_stride=1, area_threshold=10, pixels_threshold=10, merge=False, margin=0)¶
描述: 查找图像中所有色块,并返回一个包括每个色块的色块对象的列表。请观察
blob对象以获取更多信息。
- 参数:
thresholds- 必须是元组列表。[(lo, hi), (lo, hi), ..., (lo, hi)] 定义你想追踪的颜色范围。对于灰度图像,每个元组需要包含两个值-最小灰度值和最大灰度值。仅考虑落在这些阈值之间的像素区域。对于RGB565图像,每个元组需要有六个值(l_lo,l_hi,a_lo,a_hi,b_lo,b_hi) - 分别是LAB L,A和B通道的最小值和最大值。为方便使用,此功能将自动修复交换的最小值和最大值。此外,如果元组大于六个值,则忽略其余值。相反,如果元组太短,则假定其余阈值处于最大范围。
invert- 反转阈值操作,像素在已知颜色范围之外进行匹配,而非在已知颜色范围内。
roi- 感兴趣区域的矩形元组(x,y,w,h)。如果未指定,ROI即整个图像的图像矩形。操作范围仅限于roi区域内的像素。
x_stride- 查找某色块时需要跳过的x像素的数量。找到色块后,直线填充算法将精确像素。若已知色块较大,可增加x_stride来提高查找色块的速度。
y_stride- 查找某色块时需要跳过的y像素的数量。找到色块后,直线填充算法将精确像素。若已知色块较大,可增加y_stride来提高查找色块的速度。
area_threshold- 若一个色块的边界框区域小于area_threshold,则会被过滤掉。
pixel_threshold- 若一个色块的像素数小于pixel_threshold,则会被过滤掉。
merge- 若为True,则合并所有没有被过滤掉的色块,这些色块的边界矩形互相交错重叠。
margin- 可在相交测试中用来增大或减小色块边界矩形的大小。例如:边缘为1、相互间边界矩形为1的色块将被合并。合并色块使颜色代码追踪得以实现。每个色块对象有一个代码值
code,该值为一个位向量。 例如:若您在 image.find_blobs 中输入两个颜色阈值,则第一个阈值代码为1,第二个代码为2(第三个代码为4,第四个代码为8,以此类推)。 合并色块对所有的code使用逻辑或运算,以便您知道产生它们的颜色。这使得您可以追踪两个颜色,若您用两种颜色得到一个色块对象,则可能是一种颜色代码。若您使用严格的颜色范围,无法完全追踪目标对象的所有像素,您可能需要合并色块。最后,若您想要合并色块,但不想两种不同阈值颜色的色块被合并,只需分别两次调用
image.find_blobs,不同阈值色块就不会被合并。
blob对象为字典类型,含关键字如下述:
关键字
说明
corners
返回对象的4个角的4 (x,y)元组列表。从左上方开始按顺时针顺序返回角。
min_corners
返回包含4个角的4 (x,y)元组的列表,该元组的边界大于该Blob的最小面积矩形的边界。 与 blob.corners() 不同,最小面积矩形的角并不一定位于blob上。
x
色块的边界框的x坐标(int)
y
色块的边界框的y坐标(int)
w
色块的边界框的宽
h
色块的边界框的高
pixels
属于色块(int)一部分的像素数量
cx
色块(int)的中心x位置
cy
色块(int)的中心y位置
rotation
返回色块的旋转(单位:弧度)。如果色块类似铅笔或钢笔,那么这个值就是介于0-180之间的唯一值。 如果这个色块圆的,那么这个值就没有效用。
rotation_deg
以度为单位返回blob的旋转角度。
rotation_rad
以弧度为单位返回blob的旋转度数。这个方法比 blob.rotation() 更具描述性。
code
返回一个32位的二进制数字,其中为每个颜色阈值设置一个位,这是色块的一部分。 例如,如果您通过 image.find_blobs 来寻找三个颜色阈值,这个色块可以设置为0/1/2位。 注意:除非以 merge=True 调用 image.find_blobs ,否则每个色块只能设置一位。 那么颜色阈值不同的多个色块就可以合并在一起了。 您也可以用这个方法以及多个阈值来实现颜色代码跟踪。
count
返回合并到此Blob中的Blob数。
perimeter
返回该blob周长上的像素数。
roundness
返回0到1之间的值,表示对象的圆度。一个圆将是1。
elongation
返回一个介于0和1之间的值,该值表示对象的长度(不是圆形)。一条线将是1。
area
返回色块周围的边框面积(w * h)
density
返回这个色块的密度比。这是在色块边界框区域内的像素点的数量。 总的来说,较低的密度比意味着这个对象的锁定得不是很好。 结果在0和1之间。

- Image.find_apriltags()¶
描述: 查找图像内的所有AprilTag, 并返回一个 image.apriltag 对象的列表。请参考 image.apriltag 对象以获取更多信息。
与二维码相比,AprilTags可在更远距离、较差光线和更扭曲的图像环境下被检测到。 AprilTags可应对所有种类的图像失真问题,而二维码并不能。也就是说,AprilTags只能将数字ID编码作为其有效载荷。 AprilTag使用的是 TAG36H11 。
参数:
apriltag对象为字典类型,含关键字如下述:
关键字
说明
corners
返回对象的4个角的4 (x,y)元组列表。从左上方开始按顺时针顺序返回角。
x
AprilTag的边界框的x坐标(int)
y
AprilTag的边界框的y坐标(int)
cx
AprilTag(int)的中心x位置
cy
AprilTag(int)的中心y位置
id
返回AprilTag的数字ID。TAG36H11 -> 0 to 586。
rotation
返回以弧度计的AprilTag的旋度(int)。
decision_margin
返回AprilTag匹配的色饱和度(取值0.0 - 1.0),其中1.0为最佳。
hamming
返回AprilTag的可接受的数位误差数值。
goodness
返回AprilTag图像的色饱和度(取值0.0 - 1.0),其中1.0为最佳。
x_translation
返回距离摄像机x方向的变换,距离的单位未知。
y_translation
返回距离摄像机y方向的变换,距离的单位未知。
z_translation
返回距离摄像机z方向的变换,距离的单位未知。
x_rotation
返回以弧度计的AprilTag在X平面上的旋度。例:目视AprilTag,从左至右移动摄像头。
y_rotation
返回以弧度计的AprilTag在Y平面上的旋度。例:目视AprilTag,从上至下移动摄像头。
z_rotation
返回以弧度计的AprilTag在Z平面上的旋度。例:目视AprilTag,旋转摄像头。
Sensor 类¶
摄像头传感器模块,进行摄像头配置及图像抓取等,用于控制开发板摄像头完成摄像任务。
- class Sensor(repl)¶
- Sensor.snapshot()¶
描述: 摄像头拍摄图像,返回
Image对象。
- Sensor.set_hmirror(enable)¶
描述: 水平镜像模式。
参数:
True打开或False关闭。默认关闭。
- Sensor.set_vflip(enable)¶
描述: 垂直翻转模式。
参数:
True打开或False关闭。默认关闭。
- Sensor.set_framesize(framesize)¶
描述: 用于设置摄像头输出帧大小,k210最大支持VGA格式,大于VGA将无法获取图像。推荐设置为
Sensor.QVGA大小。参数:
Sensor.VGA -- 640x480
Sensor.QVGA -- 320x240
Sensor.QQVGA -- 160x120
Sensor.QQQVGA -- 80x60
Sensor.QQQQVGA -- 40x30

- Sensor.set_pixformat(format)¶
描述: 用于设置摄像头输出格式,推荐设置为
Sensor.RGB565格式参数: - Sensor.RGB565 -- 8-bits per pixel. - Sensor.GRAYSCALE -- 16-bits per pixel.

- Sensor.set_windowing(roi)¶
描述: 设置摄像头窗口大小。例如:你可以 set_windowing((224,224)) , 然后
Sensor.snapshot()以捕捉由摄像头输出的320*240分辨率的224x224中心像素。 您可使用窗口来获得定制的分辨率。参数: - `摄像头窗口设置有限制,宽和高必须为8的倍数
- Sensor.run(enable)¶
描述: 启动或关闭捕获图像功能(默认经过复位,设置帧大小,设置像素格式后会自动启动摄像头,不调用run(1)也会开始采集图像)
参数: -
enable-- 1 表示开启 0 表示停止
- Sensor.set_auto_whitebal(enable)¶
描述: 设置摄像自动白平衡模式,默认打开
参数: -
True打开或False关闭。默认关闭。
LCD 类¶
显示屏控制
构建对象¶
- class LCD¶
- LCD.display(image[, roi, oft])¶
描述: 在液晶屏上显示一张 image(GRAYSCALE或RGB565)。
参数:
image-- 为Image对象
roi-- 一个感兴趣区域的矩形元组(x, y, w, h)。若未指定,即为图像矩形
oft-- 图像显示位置
- LCD.clear(color=LCD.BLACK)¶
描述: 将液晶屏清空为黑色或者指定的颜色

- LCD.draw_string(x, y, text [, font_color=LCD.RED, bg_color=LCD.BLACK]):
在lcd屏上绘制文本。从(x,y)位置开始绘制text文本,
font_color为文本的颜色。bg_color为背景颜色。参数: 颜色常量
LCD.BLACK-- 黑色
LCD.NAVY-- 深蓝色
LCD.DARKGREEN-- 深绿色
LCD.DARKCYAN-- 深青色
LCD.MAROON-- 褐红色
LCD.PURPLE-- 紫色
LCD.OLIVE-- 橄榄色
LCD.LIGHTGREY-- 淡灰色
LCD.DARKGREY-- 深灰色
LCD.BLUE-- 蓝色
LCD.GREEN-- 绿色
LCD.RED-- 红色
LCD.MAGENTA-- 洋红色
LCD.YELLOW-- 黄色
LCD.WHITE-- 白色
LCD.ORANGE-- 橙色
LCD.GREENYELLOW-- 黄绿色
LCD.PINK-- 粉色
KPU 类¶
KPU是通用的神经网络处理器,它可以在低功耗的情况下实现卷积神经网络计算,时时获取被检测目标的大小、坐标和种类,对人脸或者物体进行检测和分类。
KPU 具备以下几个特点:
支持主流训练框架按照特定限制规则训练出来的定点化模型
对网络层数无直接限制,支持每层卷积神经网络参数单独配置,包括输入输出通道数目、输入输 出行宽列高
支持两种卷积内核 1x1 和 3x3
支持任意形式的激活函数
实时工作时最大支持神经网络参数大小为 5.5MiB 到 5.9MiB
非实时工作时最大支持网络参数大小为(Flash 容量-软件体积)
构建对象¶
- class KPU¶

- KPU.load(path)¶
描述: 从flash中加载模型。加载后,返回 kpu_net 模型网络对象 。path 可以是模型在 flash 中的偏移大小,如 0xd00000 表示模型烧录在13M起始的地方 。
AI摄像头、1956 、人工智能交互实验箱均在flash里烧录一些常用的模型,如下:
模型
flash地址
人脸追踪(yolo2)
0x300000
手写数字(分类器)
0x600000
20类(yolo2)
0x640000

- KPU.load(path)¶
描述: 从文件系统中加载模型。加载后,返回 kpu_net 模型网络对象 。path 可以是模型在文件系统中为文件名, 如 "/sd/xxx.kmodel"
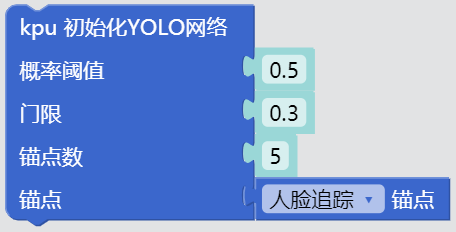
- KPU.init_yolo2(kpu_net, threshold, nms_value, anchor_num, anchor)¶
描述: 为yolo2网络模型传入初始化参数。
参数:
kpu_net-- KPU.load() 返回的模型网络对象
threshold-- 概率阈值
nms_value-- box_iou 门限
anchor_num-- 锚点数
anchor-- 锚点参数与模型参数一致
- KPU.run_yolo2(kpu_net, image_t)¶
描述: 运行yolo2网络。如侦测到对象,函数会返回含侦测到对象的列表,无,则返回 None 。每个对象为一个字典类型的成员。返回如下:
>>> [{'classid': 14, 'objnum': 1, 'w': 302, 'index': 0, 'y': 5, 'x': 19, 'h': 240, 'value': 0.546819},{'classid': 14, 'objnum': 1, 'w': 232, 'index': 0, 'y': 38, 'x': 0, 'h': 216, 'value': 0.898214}]参数:
kpu_net-- KPU.load() 返回的模型网络对象
image_t-- 从 sensor 采集到的图像
- KPU.forward(kpu_net, img)¶
描述: 计算已加载的神经网络网络模型。返回,模型运算的最终结果,为元组类型,可用于图像分类的模型应用。
参数:
kpu_net-- KPU.load() 返回的模型网络对象
img-- 从 sensor 采集到的图像
- KPU.deinit()¶
描述: 反初始化,释放模型资源。